Full Mecánica
Para todos los amantes de la Tecnología Mecánica
MOTORES PASO A PASO
4- MOTORES PASO A PASO
Ingles: Stepper motors
El propósito de los motores paso a paso (steppers) es rotar un ángulo especifico y parar. La velocidad y el torque son asunto secundario. Cada giro se llama paso (step), los ángulos de paso más comunes son 30°. 15°,7.5°, 5°, 2.5°, y 1.8°. mientras más pequeño sea el paso, mejor es la resolución.
Se emplean en relojes analógicos, robots, impresoras (2D y 3D), etc.
Otra importante característica es el llamado “torque de sostenimiento” (holding torque) se refiere a la resistencia del motor a ser girado por un torque externo cuando está parado. son de dos tipos.
- motores paso a paso, giran en pasos hasta alcanzar el angulo deseado.
- motores servo, no necesitan dar "pasos" para girar un angulo dado, en su lugar giran de contínuo y se paran cuando dicho angulo alcanza el valor deseado.
Los motores modernos paso a paso pueden dividirse en tres categorías:
- De imán permanente (PM) – elevado torque, pobre resolución angular
- De reluctancia variable (VR) – excelente resolución angular, bajo torque
- Híbrido (HY) – combina las estructuras de los motores paso a paso PM y VR, da buena resolución angular y torque.
4.1 Motores paso a pasos de imán permanente (PM)
Pequeños y confiables son populares en dispositivos empotrados como drives de discos he impresoras de computadoras.
Tienen bastante en común con los brushless DC (BLDC*) solo que en este caso las bobinas se energizan para una rotación discreta en lugar de rotación continua.
4.1.1 Estructura
Los motores paso a paso de imán permanente (PM) son similares a los “innruner BLDCs” en muchos aspectos como:
- No tienen escobillas
- Las bobinas rodean al rotor que contiene los imanes permanentes, y el controlador energiza las bobinas con pulsos de corriente DC.
- Grupos de bobinados están conectados entre sí. Cada grupo forma una fase. Casi siempre tienen dos fases.
- Los PM tienen muchos bobinados he imanes en contraste con los BLDCs que tienen pocos bobinados.
- Vale la siguiente igualdad: BLDCs=Motor paso a paso de imán permanente (PM) con las respetivas diferencias.

Figura-07.- motores paso a paso de imán permanente. las Parejas de bobinas son ubicadas una frente a la otra y conectadas en serie a la misma fase.
4.1.2 Operación.
El ángulo del paso está determinado por el número de bobinas he imanes (el motor de la fig. tiene 12 bobinas y 6 imanes.
Los motores paso a paso de imán permanente (PM) son generalmente de dos fases, El trabajo del controlador es alimentar las bobinas con pulsos de corriente de modo que el rotor gire 30° cada vez. Las señales de control son la mayor diferencia entre los motores paso a paso y los BLDC.
FUNCIONAMIENTO Lo siguiente es extracto de M02 pg670
En los motores paso a paso (PM) el rotor esta magnetizado radialmente, de modo que sus polos se alinean con los dientes respectivos del estator. Note que las bobinas 1 y 2 cambian de polaridad con el cambio de estado de activas-Positivo-inactivas-activas-Negativo-inactivas. Note también que las bobinas 1 y 3 así como las 2 y 4 están conectadas en seriE.
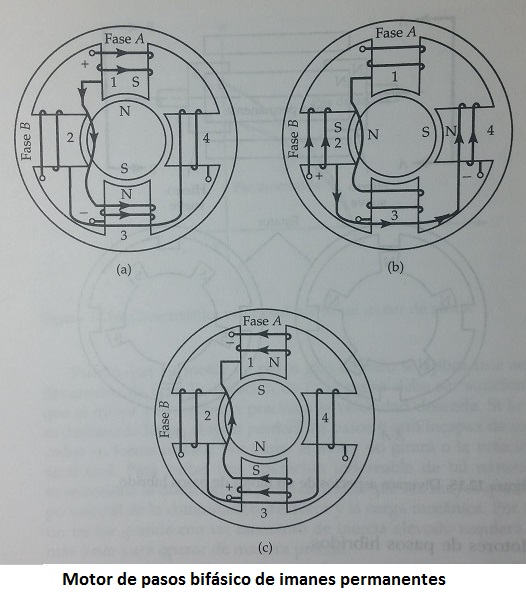
Figura-08

Figura-09 Los pulsos de la figura se corresponden con las secuencias de giro de la figura anterior. Note que la corriente se invierte.